- ������3RW3016-1BB04������
��ϸ��Ϣ
Ʒ���������� �ͺ���3RW3016-1BB04 �ӹ��������� ��;��ֱ���� �������2 A ���ѹ��2 V ʹ�õ����2 ��Ʒ��֤��2 ������3RW3016-1BB04������ SIRIUS ������ S00 9 A��4 kW/400 V��40 °C 200-480 V AC��24 V AC/DC �ݶ�����
�Ϻ������Զ����豸����˾�����Ӵ�����
24Сʱ��ϵ
�� �� �� �� QQ�� ---
ֱ������ �� ����
�� �棺
�� ϵ �ˣ� �� �����أ��¹�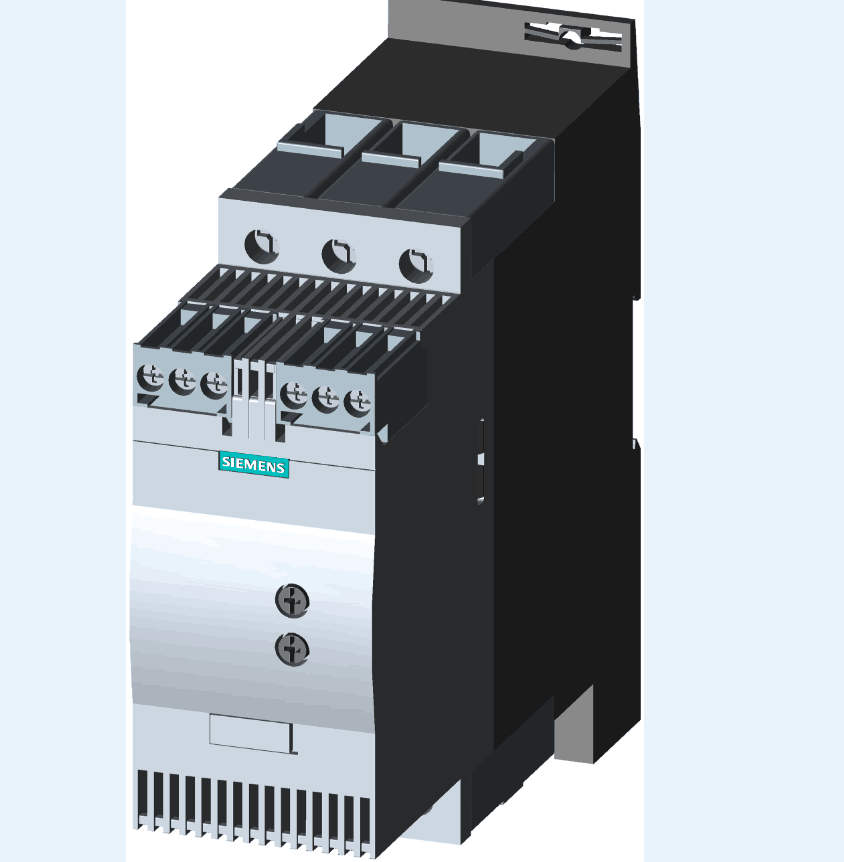
��װ��ȫ��ԭװ
�ʱ����������ӳ���Ҫ����һ�꣨��Ϊ���س��⣩
������ʽ����17%��ֵ˰�����ÿ�ݷ�ʽ��������ȫ�����ء�
�ҹ�˾Ϊ�����Ӳ�Ʒ���۵㣬���۲�Ʒ��Ϊȫ��ԭװ���ҹ�˾��*�ļ�������ʦ�������Ű�װ���ԣ��ṩ����֧�ֵȷ���
������3RW3016-1BB04��� ���� 1 �� STEP 7 V12 (TIA Portal) ��ѡ��˵� “ѡ�� > ��װ�豸�����ļ���GSD��”�� “��װ�豸�����ļ�” �ĶԻ����
ͼ 012 ��Դ·����ָ����� SIRIUS 3RW44�������� �� GSD �ļ���·����
ѡ�������� SIRIUS 3RW44 �� GSD �ļ������ “��װ” ��ť����װѡ��� GSD �ļ���
ͼ 023 GSD �ļ��ɹ���װ��SIRIUS 3RW44 ��������λ��Ӳ��Ŀ¼ “�����ֳ��豸 > PROFIBUS DP > Switching devices > Siemens AG > Motor starter > Direct soft starter > SIRIUS 3RW44” ��
ͼ 034 ��ק SIRIUS 3RW44 ����������������ͼ���� CM1243-5 �� PROFIBUS �ӿں� SIRIUS 3RW44 ��������֮������ק����һ�����ӡ����� SIRIUS 3RW44 ������������Ϊ DP ��վ���ӵ���Ϊ DP ��վ�� CM1243-5 ���ˡ�
ͼ 04�� 01
�� S7-1200 ���û��������磬��OB1 �е��� “RDREC” ָ������ȡ������ SIRIUS 3RW44 �����ݼ�¼��
ͼ 05�� 02 ˵���� “RDREC” ָ������롣
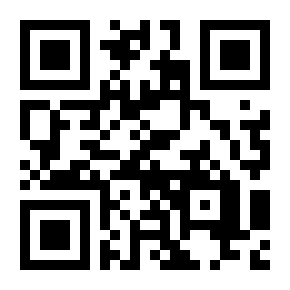
������3RW3016-1BB04SIRIUS�����������S00��9A��1.5KW/400V��40°C������200-480V����ֱ��24V���ݶ����߶��� SIRIUS 3RW30 ������ͨ���ɱ���λ���ƽ����˵����ѹ��������ӿ�ѡ��Ŀ�ʼ��ѹ��б��ģʽ��������Դ��ѹ����ʱ����Щ�豸������ת���Լ����������ɷ�ֱֹ������-��������ʱ�����ij������������е���غ͵�Դ��ѹѹ���ܹ��ɿ��ĵõ����͡� �������������豸��Ӧ����������ĥ�������������ʱ��ϳ�����ѡ����ֵ��ζ���������ɵ���������������Ӧ�õ������Ҳ�����-���������������ھ��й̶���ѹ�ȵ����������� SIRIUS 3RW30 �������ڶԿռ�����С�Ͼ���ͻ�����ԡ�����ʽ��ͨ������ζ�ŵ�����ڽ���ʱ���迼�ǹ��ʰ뵼�壨��բ�ܣ��Ĺ��ġ��Ӷ�����������ʧ��ʹ��Ƹ��ӽ��գ��������ⲿ��ͨ��·�� ���ṩ�����ͺŵ� SIRIUS 3RW30 �������� ?���ͺ����ڶ�������������� S00��S0��S2 �� S3����������ͨ�Ӵ�ϵͳ ?�ͺ����� 22.5 mm ����ڵĶ���������������ͨ ��������ʴ� 55 kW��400 V ʱ������������������еı�Ӧ�á��ÿ����������гߴ�С�����ĵͺ����ڵ��Ե��ŵ㡣 ������ ������ SIRIUS 3RW30 ����������Ŀռ��Ϊ���ڱȽ϶ֵ wye-delta �ĽӴ�������ռ������֮һ���ⲻ����Լ�˿��ƹ�ͱ���װ����Ŀռ䣬����ȫʡȥ�� wye-delta ��������IJ��߹���������ڸߵ���ֵ��Ϊ���ԣ���Щ�߶ֵ��������������������� ͬʱ�����������͵������ĵ��´��������ٵ����������յ����γߴ硢����ʱ�䡢���ߺͿ��ٵ���ʹ���������������Եijɱ����ơ� ��Щ����������ͨ�����ڹ���ʱ��һ�����ɹ�̬��ϵͳ�������Ӷ��ڹ���ʱ�ɷ�ֹ����ͨ������ƻ�������Ȧ�������������������ɵĶ��ݵĿ��Ƶ�ѹ���ϡ���е����������صIJ���ȱ�ݡ� ���豸ϵ�в���“����ƽ��”���Ʒ��������ڱ���������Ƶ��������е�ֱ�����������������������������������������λ�ص��ĵ���������δ�ܿ��Ƶ���λ����Ҳ�ǵ��µ����������������ǶԳƷֲ�������ԭ������Ȼ����Ӱ�죬���ڴ����Ӧ�����Բ��ɺ��ӡ� ���ƹ��ʰ뵼�岻�����²��Գƣ�����ѹ���ڵ����ѹֵ�� 50 % ʱ��������֮ǰ�ᵽ��ֱ�������������ص�������������Щ�������Ŀ��Ʒ���ʡȥ��������λ��ֱ������������ֹ�˿��ܲ������ƶ�Ť�ء� �÷������������ٶȡ�Ť�غ͵���������һ�µĵ�������Ӷ���ʵ�ֵ���Ļ���������ͬʱ��������������������������������ӽ�����ͨ����������ڼ䲻ͬ���벨�����ij����Ķ�̬Э���;�����ʵ�֡��������Ϊ“����ƽ��”�� ?��ѹб��������ѹ�ĵ��ڷ�Χ Us Ϊ 40% �� 100%��б��ʱ�� tR Ϊ 0s ~ 20s�� ?����ʽ��ͨ�Ӵ�ϵͳ����С��������ʧ ?ʹ��������λ������ ?��װ����Լ� ?��Դ��ѹΪ 50/60 Hz��200 ~ 480 V ?�������Ƶ�ѹ�ͺ� 24 V AC/DC �� 110 - 230 V AC/DC ?���¶ȷ�Χ���� -25 ~ +60 �� ?���ø�������ȷ���û��Ѻÿ��ƣ�������ϵͳ�ڽ�һ��������
��PLSָ�����ı�PTO��PWM���Ρ�����ǰ��ѧϰ��ʹ�ò����һЩʹ��Ҫ�㣬���ǻ�Ҫ֪���ľ���PTO״̬�ֽڵĿ���λ��SM66.7��SM76.7��������־�����������ɡ����⣬������������ʱ�����ǻ������������巢������жϣ�ʹ������ת���жϷ���������ִ�С���ô�Ͳ����⼸�����ݡ�
��������������һ���������ָ�����������ת���Ƶ����ӡ�
������
���ټ������ӳ���
������������ӳ���
�жϳ���
������������һ�����ټ����ӳ������������ӳ����ڸ��ټ������ӳ����У������Ƕ�������ֽڣ���16#F8��SMB37������Ϊ�Ӽ������µ�ǰֵ������0��SMD38д���ʼֵ��������Ǹ��ټ�����HSC0��HSCģʽ12��Ȼ����ټ������������˸��ټ������жϣ�PTO0����жϵ��¼�Ϊ�ж��¼���19�����ǽ����жϳ���0���ж��¼�19���ж����ӣ���ȫ�������жϡ�
���ڸ�����������ӳ������棬���Ƕ���һ�½ӿڣ���������io_timeΪLW0��ΪIN���͵ģ�����������io_NOΪLD2��Ҳ��ΪIN���͵ģ�Ȼ��д�ӳ������ȴ���16#85��SMB67�ж�������ֽڣ�����ѡ�����PTOģʽ�����Ρ�1us/���ڡ�װ�����ں�������������������ֽڵĶ�����Բο�PTO/PWM�����ֽڱ�����������LW0��SMW68��д������ֵ������LD2��SMD72��д����������*��ִ��PLSָ���ô����������һ�������ܲ������ӳ���֮�����������п��Զ���������ܲ������ӳ�����е��á�
������3RW3016-1BB04������ -
��Ӧ�̵����������Ϣ
�鿴����
-
 �Ϻ������Զ����豸����˾��ѯ����
�Ϻ������Զ����豸����˾��ѯ����
021-57643608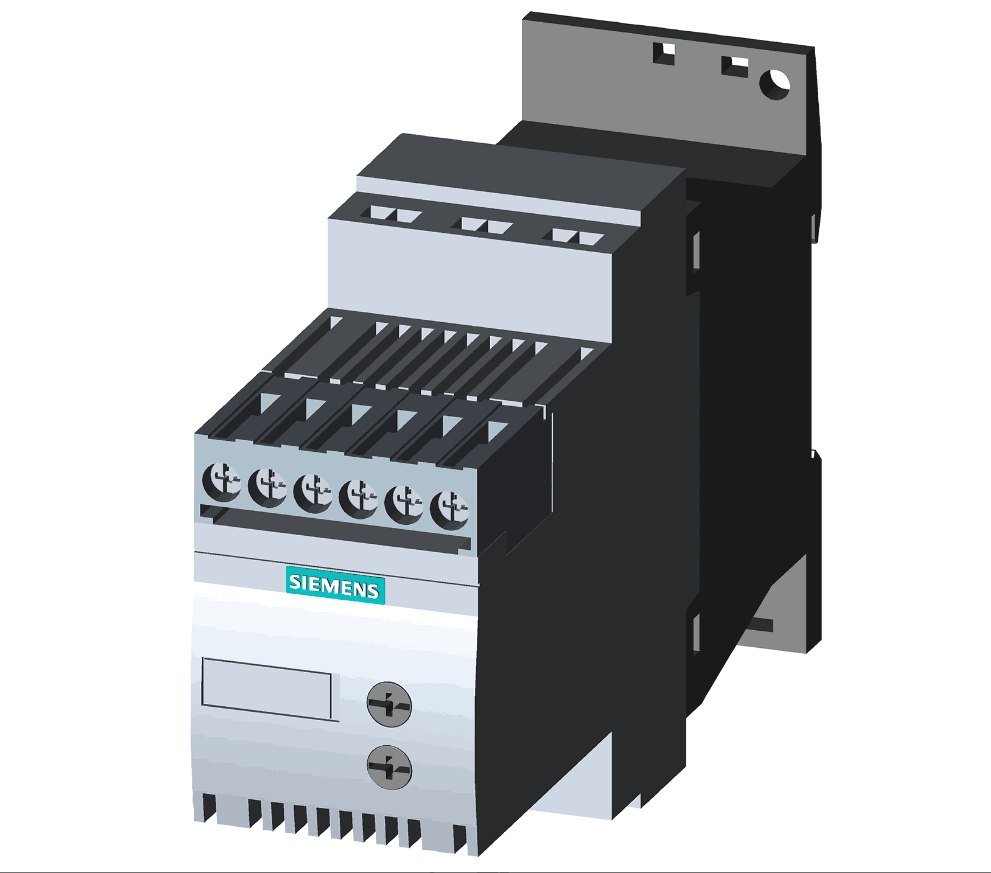
������3RW3016-1BB04������
ҳ��۸�����ο�����������ϵ���������� �۸� - �R1 ̨
��223.00
- ��Ʒ�ͺţ�3RW3016-1BB04
- Ʒ �ƣ�������
- �� �� �أ��Ϻ�
- �������ڣ�2024-04-30
ѡ�� 1̨���� ��223.00 ������ -+�ϼƣ�1̨�ܼۣ�223.00Ԫ����ϵ��ʱ����˵���Ǵӹ����������ģ�лл���������Ƽ���Ʒ
 ��3981.00
��3981.00- ��2470.00
- ��1829.00
- ��1807.00
- ��1515.00
- ��1629.00
�Ϻ������Զ����豸����˾ �绰��021-57643608 �ֻ���15960736755 ��ַ�� �Ϻ����ɽ�����������������Ϊ������ƽ̨����������Ϣ�����ṩ�ߣ����٣�����վ���ͻ��˵ȣ���չʾ����Ʒ/����ı��⡢�۸��������Ϣ����ϵ�ɵ��̾�Ӫ�߷���������ʵ�ԡ�ȷ�ԺͺϷ��Ծ��ɵ��̾�Ӫ�߸��𡣹���������������Ʒ/����ǰע�������ʵ����������Ʒ/����ı��⡢�۸�������κ���Ϣ���κ����ʵģ����ڹ���ǰͨ����������̾�Ӫ�߹�ͨȷ�ϣ������ϴ��ں������̣��������ֵ��������κ�Υ��/��Ȩ��Ϣ�����ڹ�����ҳ����Ͷ��ͨ������Ͷ�ߡ�