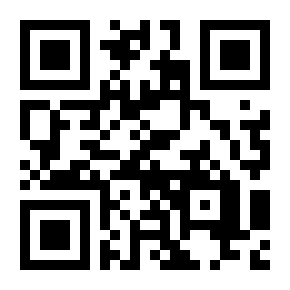
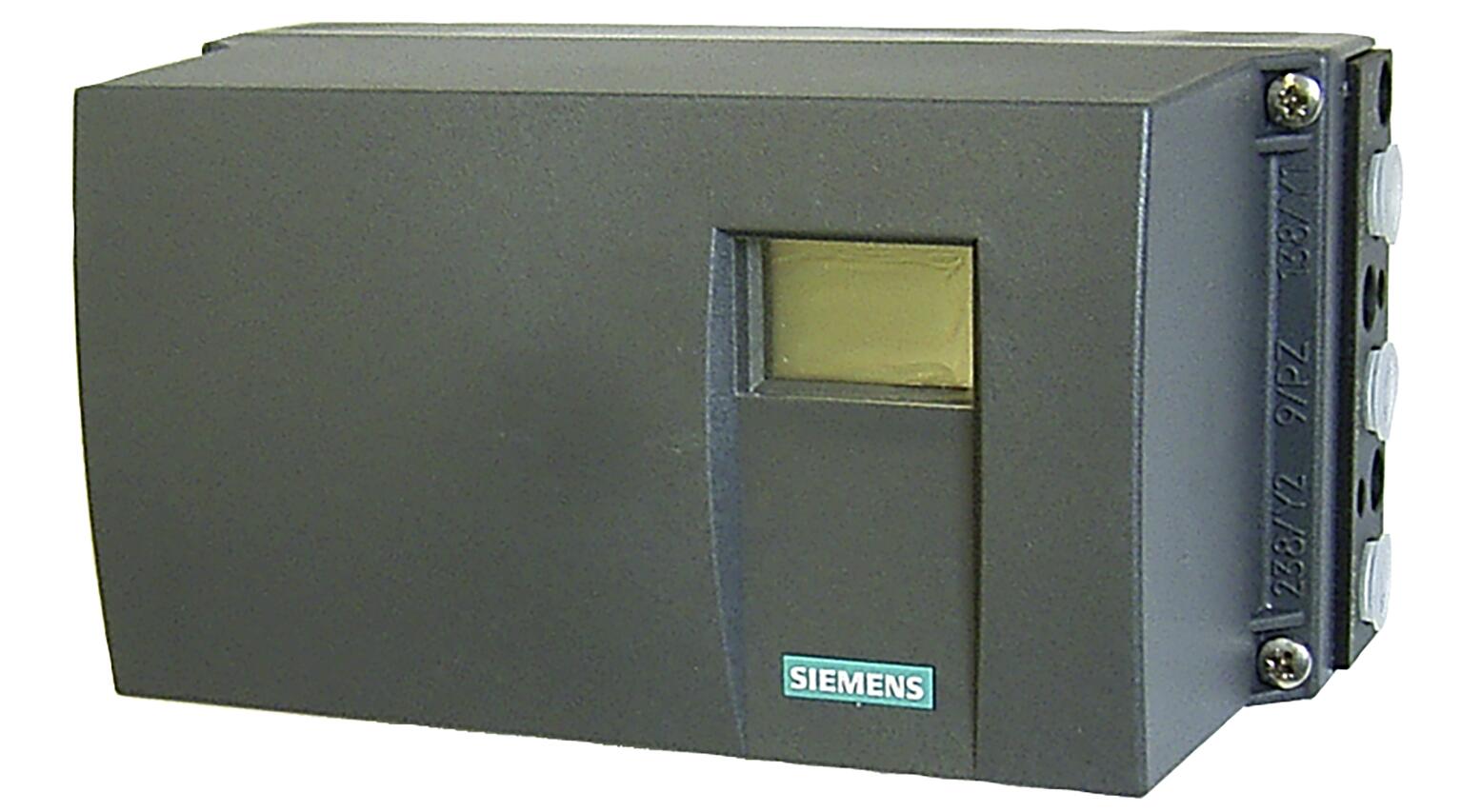
������6DR5110-0NN00-0AA0������ SIPART PS2 ���ܻ� �綯����λ�õ����� ��������ʽ���� �Ͱڶ����� 2��������4...20mA �� HART �ӿ� ����Ч�� ��̼������� ���ɹ̶�������̼�. �������� �������� �綯��1/2" NPT / ������1/4" NPT ����ֵ������ ��ѡ��ģ�� . ��Ҫ˵�� ���� / Ӣ�� / ���� . �ް�װ��ѹ���Ƶ�Ԫ
�Ϻ������Զ����豸����˾�����Ӵ�����
24Сʱ��ϵ
�� �� �� �� QQ�� ---
ֱ������ �� ����
�� �棺
�� ϵ �ˣ� �� ��
���أ��¹�
��װ��ȫ��ԭװ
�ʱ����������ӳ���Ҫ����һ�꣨��Ϊ���س��⣩
������ʽ����17%��ֵ˰�����ÿ�ݷ�ʽ��������ȫ�����ء�
�ҹ�˾Ϊ�����Ӳ�Ʒ���۵㣬���۲�Ʒ��Ϊȫ��ԭװ���ҹ�˾��*�ļ�������ʦ�������Ű�װ���ԣ��ṩ����֧�ֵȷ���
������6DR5110-0NN00-0AA0
SIPART PS2 �����ܵ������Ŷ�λ���Ĺ���ԭ���봫ͳ��λ����ȫ��ͬ��
������ʽ
1.�����������Ը���ֵ��λ�÷������Ƚϡ� �����������ƫ�������һ���岽���س���������ѹ�緧��ѹ�緧�������ڽ���ִ
�������ҵ���������
2.����������ƫ�����ֵ W ��λ�÷����ź�X���Ĵ�С�ͷ������һ�����ָ���ѹ�緧��
3.ѹ�緧������ָ��ת��Ϊ����λ��������
4.������ƫ��ܴ�ʱ��������������λ�����һ�������źţ�������ƫ�������������λ������������塣
5.��������ƫ����������Χ�ڣ�����Ӧ��ɵ�����״̬������û�п���ָ�������
6.SIPART PS2 ��λ�������ʵ��İ�װ����̶���ֱ����г�ִ�����ϣ�ִ������ֱ��ת��λ��ͨ����װ�������Ⲣ����ĥ���ӵ���
���ϵ�λת������
7.װ��ֱ��ִ�����ϵ�������ĽǶ����Զ���У����
8.�� SIPART PS2 ���ö���������ʱ������ȫ��4 �� 20mA �����ź��л�ȡ��Դ�����PROFIBUS��SIPART PS2 PA�������ź��л�ȡ��Դ��
���ڻ�����ֳ����ߣ�FF��ͬ�����á�
��Ԥ��ѹ�緧����������
ѹ�緧�����ͷź̵ܶĿ������塣 ����ܹ��ﵽ�ܸߵĶ�λ���ȡ� ����Ԫ����һ��ѹ�����Ϳ��أ���ͬ������·����һ�� ѹ�緧���
�м����Ĺ���������
������6DR5110-0NN00-0AA0
�����ӷ��Ŷ�λ�����Է�����
���������ж���Ӧ�ã����Զ�λ��װ��������ִ�л�������Ӧ����ʼ��������ʼ�������������ַ�ʽ���У�
����1.�Զ���ʼ��
������ʼ�����Զ����еġ���λ��˳��ⶨ���÷����г̻�ת�ǡ�ִ�������г�ʱ�䣬������ִ������̬����ʱ�Ŀ��Ʋ�����
����2.�ֶ���ʼ��
����ִ�л������г̻�ת�ǿ����ֶ��������������ͬ�Զ���ʼ��һ���Զ��ⶨ����һ����������ͣʱ��Ҫ��
����3.���Ƴ�ʼ�����ݣ���λ�����û���
�����Ծ���HART ���ܵĶ�λ�������ʼ�����ݿ��Զ��������͵���һ����λ������ˣ�����һ̨���϶�λ����������Ϊ��ʼ�����ж�����
���̡���ʼ��֮ǰ����ֻ��Զ�λ�����ú��ٲ����������������ȱֵ��ͨ�������ġ�
����
������������ʱע������
����һ��ֱ�г�ִ��������
����1������Ӧ�İ�װ�����װ��λ����
����ע�⣺�ܸ˱��ʿ��ص�λ�öԶ�λ���dz���Ҫ��
����2���ƶ���������������λ�ã�������̵�λ�û���ߵ�һ���̶�λ�ú�����ñš������������ 3���������������Ӷ�λ����ִ
�л���������λ���ṩ��Դ�� 4��������Ӧ�ĵ������ѹԴ��
����5�����ڶ�λ������“P manua1”��ʽ������ʾ����һ����ʾ��ǰ��λ�Ƶİٷֱȵ�ѹֵ��P���� ����“P 37.5”����ʾ����
��“NOINI”����˸��
����6��ͨ���Ϻ��¼��ƶ�ִ�л����ﵽÿһ��*��λ�ã�������еװ���Ƿ����ȫ��������Χ�������ƶ���
����ע�����㱣��*��������°�ѹ��ͬʱ��ѹ��һ�����ʱ���ɿ����ƶ�ִ�л���
����7�������ƶ�ִ������ʹ�˴ﵽˮƽλ�ã���ʾ������ʾһ������P48.0 ��P52.0 ֮���ֵ����� �����������������ĥ���н���Ԫ
��ֱ����ˮƽ����ʾ“P50.0”ʱ��ȷ�е�˵����ﵽ����һֵ����λ���ܲⶨ��λ�ƽ���
�����������Ƴ�ʼ�����ݣ���λ���û���
����1���ӱ��û��Ķ�λ���У�ͨ��PDM ��HART ͨѶ���ʹ������ж���װ�ò����ͳ�ʼ�����ݣ���ʼ��ʱ�ⶨ�ģ������װ������PDM ��
ʼ�����������ѱ����棬��һ�����Բ�Ҫ��
����2���̶�ִ������ͨ��λ���ϣ���е�Ļ������ģ���
����3���ӱ��û��Ķ�λ������ʾ�ж�����ǰλ��ֵ���Ҽ�¼��������������й��ϣ�ͨ��ִ�л�����
�������ŵIJⶨ�������ǰλ�á�
����4�����¶�λ������װ��λ���˱۵��û�װ���ϣ���װ�û���λ���ĸ��������ô�������ѡ���������װ����ͬ��λ�á�����װ��
���ݺ�����PDM ��Handheld �ij�ʼ�����ݡ�
����5�������ʾ�ĵ�ǰֵ��ӹ��϶�λ����¼��ֵ��һ������ĥ���н�װ�õ�����ȷֵ��
����6�����ڶ�λ���Ѿ����Բ�����
��������ȷ��ʼ�����Ķ�λ����ȣ����ȺͶ�̬���������ġ��ر���Ӳ��ͣ��λ�ú���Ӧ�Ĺ��� ���ݽ��Գ�ƫ��������ʼ����������һ�����ܵĻ�����ɡ�
1��crcУ��ʹ��ԭ��
crcУ���ڳ��������е�ԭ����Ҫ���Է�Ϊ���¼�����
*������վ��������ǰ��Ҫ���͵����ݽ���crcУ�飬��Ҫ���͵����ݺ�crcУ��Ľ��һ������վ��
�ڶ�������վ���յ���վ���͵����ݺ�Գ�ȥcrcУ��������������ٴν���crcУ����㡣
����������վ���Լ��������У����ʹ���վ���յ���У������бȶԣ����һ����˵�����յ�������ȷ�����ݣ�������һ�����������һ����˵�����յ����Ǵ�������ݣ����½���ȴ�����״̬��
���IJ���������յ�������ȷ�����ݣ���վ��Ҫ���ظ���վ�����ݽ���crcУ�飬��������������У����һ�����ظ���վ��
2������ı�д
�˴��Ҿ���֮ǰ����V��д����ֵ�ij�����������ʾ��ν�����˵���������뵽���������С��������dz���ı仯���ڽ�������жϺ��ӳ���Write�д�ҿ������ؿ��������ֳ���
ͼ2-1������
ͼ2-1
ͼ 2-2~ͼ 2-4�ǽ�������ж�
ͼ 2-2
ͼ2-3
ͼ 2-4
ͼ 2-5crcУ��
ͼ 2-5
ͼ 2-6~ͼ 2-10�ӳ���Write
ͼ 2-6
ͼ2-7
ͼ2-8
ͼ2-9
ͼ 2-10
ͼ 2-11��������ж�
ͼ 2-11
������6DR5110-0NN00-0AA0������

 �Ϻ������Զ����豸����˾��ѯ����
�Ϻ������Զ����豸����˾��ѯ����
 ��3981.00
��3981.00